Lego Tanfolyam: Szabályozástechnika
Szabályzási algoritmusokra a legkülönfélébb rendszerek tervezésénél lehet szükségünk: folyamatirányítás, robotika, erőművek, tápegységek. Ezen az alkalmon igyekszünk bemutatni, hogy érdemes egy alapszintű szabályzás implementálásának nekilátni úgy, hogy a témában teljesen kezdők is sikeresen tudják alkalmazni az átadott tudást a vizsgafeladat során.
Szabályzás hatásvázlata
Szabályzásra akkor van szükségünk egy rendszer irányításakor, ha nem tudjuk közvetlenül befolyásolni a szakasz (rendszer) irányítani kívánt paraméterét, viszont közvetett módon tudunk rá hatni. Gondoljunk csak például a modern autók sebességtartó funkciójára (tempomat): A vezető a kívánt sebességet állítja be, a rendszer pedig a motortól kért teljesítmény értéket változtatja. Nyilvánvaló, hogy ez összefüggésben van az autó sebességével, azonban mégse tudjuk azt mondani a motornak, hogy most adjon ki adott sebességhez szükséges teljesítményt. Még ha egy konstans sebesség tartását írjuk is elő, akkor is könnyen belátható, hogy egy emelkedő, vagy széllökés hatására csökkenni/növekedni fog az autó sebessége azonos leadott teljesítmény mellett. Itt jön a képbe a visszacsatolt szabályzási kör használata:
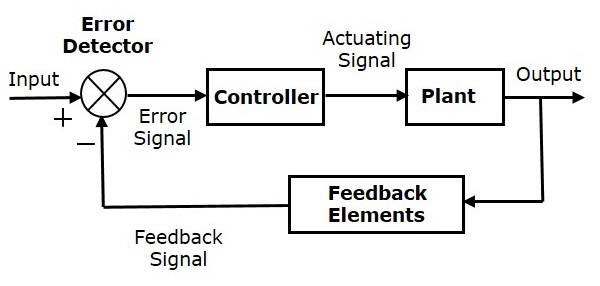
Az előírt paraméter az input ágon található, a szabályzott paraméter pedig az output. Mindkettő azonos dimenziójú, kettő különbsége a hibajel. A szabályzó a hibajelet kapja meg, ezen lefuttatja az algoritmust, majd kiadja a kiszámított beavatkozójelet a szakasznak (plant).
PID algoritmus
Rengeteg féle szabályzóalgoritmust fejlesztettek ki, és a mai napig születnek újak, mi most az alapvetőnek mondható PID algoritmussal fogunk megismerkedni.
Az algoritmus egyenlete nagyon egyszerű, mégis rengeteg esetben bőven elég a feladat megoldásához. Három részre bontható a felépítése: arányos (Proportional), integráló (Integral) és deriváló (Derivate) tagokra, a kimenet ezen tagok összege. Az arányos tag egyszerűen a hibajel felszorzott értéke, az integráló tag a hibajel integráljának, a deriváló tag pedig deriváltjának egy konstanssal szorzott értéke. Az algoritmus tervezésekor a mintavételi időt és a három konstans tényező értékét kell jól megválasztani. A konstansok hatása a rendszer viselkedésére:
- Proportional: A hibajel direktbe szorozva lesz ezzel az értékkel, így kisebb hibára is nagyobb beavatkozójellel reagál a szabályzó, így gyorsítja a hiba korrigálását, azonban könnyen instabillá válhat a rendszer nagy értékek esetén, és oszcillációba kezdhet a szakasz.
- Integral: Lassítja a rendszer reagálási idejét, negatív hatással van a stabilitásra, de megszünteti az állandó hibát.
- Derivative: Értékének növelésével agresszívebben reagál a rendszer a szabályzott változó megváltozására, így gyorsítja a beállás sebességét, azonban túl érzékennyé teheti a rendszert a zajokra.

Mint láthatjuk, a paraméterek megválasztása során kompromisszumot kell hoznunk. A teljes rendszerünk nem lehet instabil a legtöbb alkalmazás esetén, viszont szeretnénk minél gyorsabb beállást. A paraméterek megválasztására az előadáson láthatunk példákat.
Szabályzó implementálása
Bár az algoritmus ismertetése után bárki könnyen implementálhatja az algoritmust, az alkalom felgyorsítása érdekében előre megírtuk az algoritmus vázát:
#define dT 0.02
#define Ultrahang IN_3
#define P 1.0
#define I 0.0
#define D 0.0
task main() {
float integral = 0;
float lastError = 0;
// 30cm-es távolság tartása
float setpoint = 30;
// Ultrahangszenzor inicializálása
SetSensorLowspeed(Ultrahang);
while(1) {
float input = SensorUS(Ultrahang);
float error = 0;
float deriv = 0;
float output = 0;
// Ezen a tartományon még megbízhatóan működik
if (input > 200) {
input = 200;
}
// Hiba számítása
error = setpoint - input;
// Integrál számítása
integral = integral + (error * dT);
// Integráló tag limitálása
if (integral > 5) {
integral = 5;
} else if(integral < -5) {
integral = -5;
}
// Derivált számítása
deriv = (error - lastError) / dT;
lastError = error;
// Beavatkozójel számítása
output = P * error + I * integral + D * deriv;
// Beavatkozójel korlátozása
if (output > 100) {
output = 100;
} else if (output < -100) {
output = -100;
}
// Beavatkozójel érvényre juttatása (az irány a motorok állásától függhet rover-enként)
OnFwdSync(OUT_AB, (-1 * output), 0);
// Távolság (szabályzott jellemző) megjelenítés
NumOut(0, LCD_LINE1, input, TRUE);
// dT miliszekundumokban
Wait(20);
}
Off(OUT_AB);
}
További leírások: NI White paper